deeplab
v1
Atrous algorithm
- deeplab和FCN一样,也是在VGG上finetune
- 首先要解决的问题是,如何增大最后输出的score map呢?deeplab把VGG最后的pool4和pool5的stride从2变成了1,整个VGG的stride从32变成8
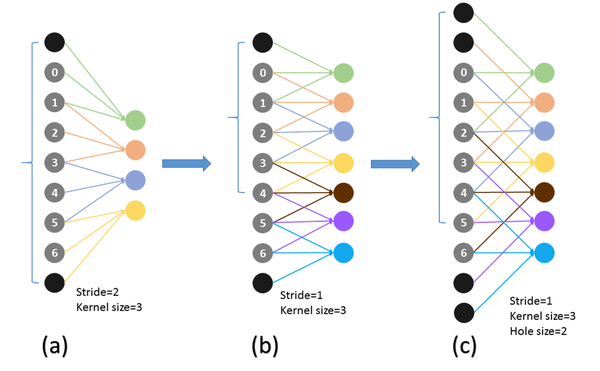
- 但是修改了stide之后,后面的conv层感受野就不一样大了,不能finetune了,所以这里引入了非常优雅的atrous algorithm
- feature map的感受野的计算公式为$RF_{i}=(RF_{i+1}-1)*stride+kernel$
- 所以在stride减小的情况下想办法增大kernel,即在kernel里面增加hole,kernel变大
Fully connected CRF
- CRF简单来说,能做到的就是在决定一个位置的像素值时(在这个paper里是label),会考虑周围邻居的像素值(label),这样能抹除一些噪音。但是通过CNN得到的feature map在一定程度上已经足够平滑了,所以short range的CRF没什么意义。于是作者采用了fully connected CRF,这样考虑的就是全局的信息了。
- 随机变量$X_i$是像素$i$的标签,变量$X$由$X_1, X_2, …, X_N$组成随机向量,$N$就是图像中的像素个数。
- 在全连接CRF中,标签$x$的能量为
$$
E(x)=\sum _i\theta_i(x_i)+\sum {ij}\theta{ij}(x_i,x_j)
$$
- $\theta_i(x_i)$是一元能量,表示像素$i$被分割成$x_i$的能量,二元能量$\theta_{ij}(x_i,x_j)$像素点$i$、$j$同时分割成$x_i$、$x_j$的能量。
- 一元能量使用FCN的输出
$$
\theta_i(x_i) = -logP(x_i)
$$
- 二元能量表达式为
$$
\theta_{ij}(x_i, x_j)=\mu(x_i, x_j)[\omega_1exp(-\frac{\left |p_i-p_j \right |^2} {2\sigma_\alpha^2}-\frac{\left |I_i-I_j \right |^2}{2\sigma_\beta^2})+\omega_2exp(-\frac{\left |p_i-p_j \right |^2} {2\sigma_\gamma^2})]
$$
- 主要参考这里
v2
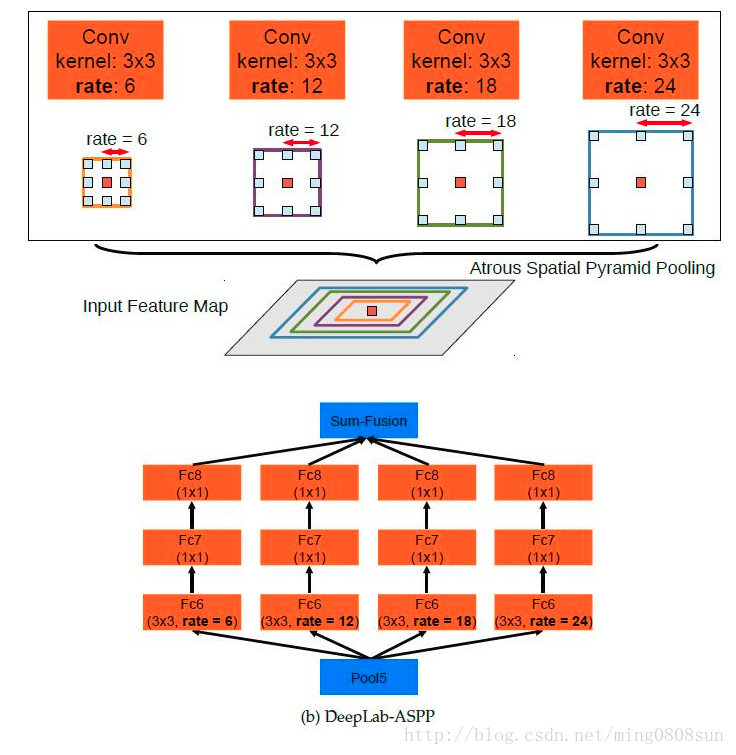
- v2在v1的基础上增加了多感受野
- 参考这里